سینماتیک
سینِماتیک (به فرانسوی: cinématique) از واژهٔ یونانی κινεῖν یا kinein به معنای جنبیدن، حرکتکردن، شاخهای از دانش مکانیک کلاسیک است که حرکت اجسام و سامانهها (گروهی از اجسام) را بدون درنظرگرفتن نیروهای عامل حرکت بررسی میکند.[1][2][3][4]
سینماتیک را نباید با شاخهٔ دیگر مکانیک کلاسیک، دینامیک تحلیلی (مطالعهٔ رابطهٔ میان حرکت اجسام و عوامل آن)، که گاهی به عنوان زیرشاخهای از سینتیک (مطالعهٔ رابطهٔ میان نیروهای خارجی و حرکت) و استاتیک (مطالعهٔ ارتباطهای یک سامانه در تعادل) شناخته میشود اشتباه گرفت. سینماتیک همچنین متفاوت از دینامیک است که در فیزیک مدرن برای توصیف تکامل-زمانی یک سامانه به کار میرود.
واژهٔ سینماتیک گرچه نسبت به گذشته کمکاربردتر گشته اما همچنان جزیی فیزیکی است.[5] واژهٔ سینماتیک همچنین در زیستمکانیک و نقل مکان حیوانی کاربرد دارد.[6]
پایهایترین کاربرد سینماتیک در حرکت انتقالی یا دورانی ذرّات است. با معرفی اجسام صلب، که مجموعهای از ذراتی با فاصلهٔ نسبی نامتغیرند، سینماتیک به درجهای بالاتر از دشواری مفهومی برده میشود. اجسام صلب میتوانند حرکتهای انتقالی یا دورانی یا هر دو را تجربه کنند. یک سامانه از اجسام صلب که میتوانند به کمک اتصالات مکانیکی به هم متصل شوند مفهوم پیچیدهتری است. سینماتیک را میتوان به این منظور به کار برد تا گسترهای از حرکات یک سازوکار را بهدستآورد یا اینکه بهطور معکوس در راستای طراحی یک مکانیزم که گسترهای از حرکات دلخواه را دارد استفاده شود. حرکت یک لنگ و نوسان یک پیستون در یک موتور از سامانههای سینماتیکی سادهاند. لنگ، نمونهای از حلقهٔ سینماتیکی باز و پیستون نمونهای از یک مکانیزم چهارمیلهای بستهاست.
حرکت خطی
سینماتیک خطی یا انتقالی،[7][8] توصیف حرکت فضایی یک نقطه در طی یک خط است که به مسیر حرکت نیز شناخته میشود.[note 1] چنین مسیری یا مستقیم است (راستخط) یا خمیده (خمیدهخط).
سینماتیک ذرات
جنبششناسی ذرات، دانش مطالعهٔ سینماتیک یک ذرهٔ منفرد است. نتایج حاصله در جنبششناسی ذرات به منظور مطالعهٔ سینماتیک مجموعهٔ ذرات، دینامیک و بسیاری شاخههای دیگر مکانیک استفاده میشود.
مکان و چارچوبهای مرجع
موقعیت یک ذره در فضا، اساسیترین مفهوم در سینماتیک است. برای تعیین موقعیت یک ذره، سه فاکتور باید تعیین شود: نقطهٔ مرجع (مبدأ)، فاصله از نقطهٔ مرجع و جهت خط مستقیمی که در فضا، نقطهٔ مرجع و ذره را به هم متصل میکند. نبود هر یک از این سه مورد، بیان موقعیت را ناقص میکند. بهطور مثال، برجی با فاصلهٔ ۵۰ متر به سوی جنوب منزل خود را در نظر گیرید. نقطهٔ مرجع، منزل و فاصله، ۵۰ متر و جهت، جنوب است. اگر شخصی ادعا کند که برج، ۵۰ متر و به سوی جنوب است سؤال طبیعی این است که «از کجا؟». اگر فردی بیان کند که برج نسبت به منزل شما در جهت جنوب است این بار، سؤال «با چه فاصلهای؟» مطرح میشود. اگر گفته شود که برج نسبت به خانهٔ شما، ۵۰ متر فاصله دارد، سؤال این است که «در چه جهتی؟». بنابراین، تمام این سه پارامتر برای بیان موقعیت یک ذره در فضا حیاتیاند.
معمولاً موقعیت را به کمک کمیتهای ریاضی که هر سه ویژگی را داشته باشند بیان میشود. رایجترینها، بردارها و اعداد مختلط است. معمولاً تنها از بردارها استفاده میشود. برای اندازهگیری فواصل و جهات، معمولاً از دستگاههای مختصات سهبعدی استفاده میشود و نقطهٔ مبدأ دستگاه را نقطهٔ مرجع در نظر میگیرند. یک دستگاه مختصات سهبعدی (با مبدأ متلاقی در نقطهٔ مرجع) که برای اندازهگیری زمان در آن تمهیداتی در نظر گرفته شده را چارچوب مرجع یا چارچوب گویند. از دیدگاه فیزیک، تمام مشاهدات بدون بیان چارچوب مرجع فاقد ارزشاند.
بردارهای مکان
بردار مکان یک ذره، برداری است که از مبدأ چارچوب مرجع به ذره کشیده شدهاست. چینن برداری، هم فاصلهٔ نقطه را از مبدأ و هم جهت آن را نسبت به مبدأ بیان میکند. در دستگاه سهبعدی، موقعیت یک ذرهٔ A به صورت زیر بیان میشود:

که xA، yA، و zA مختصههای کارتزین نقطهاند. اندازهٔ یک بردار مکان فاصلهٔ میان نقطهٔ A و مبدأ را بیان میکند؛

کسینوسهای هادی یک بردار مکان، مقیاسی کمی از جهات را فراهم میآورند. با در نظر گرفتن چارچوبهای مرجع متفاوت، توجه به اینکه بردار مکان یک ذره، یکتا نیست اساسی به نظر میرسد.
سکون و حرکت
پس از اینکه ایدهٔ یک ذره به خوبی بیان شد، مفهوم سکون و حرکت بهطور طبیعی به ذهن خطور میکند. اگر بردار مکان یک ذره (نسبت به یک چارچوب مرجع) نسبت به زمان تغییر کند، گفته میشود که ذره نسبت به چارچوب مرجع درنظرگرفتهشده در حرکت است. با این وجود اگر بردار مکان یک ذره (نسبت به یک چارچوب مرجع) نسبت به زمان تغییر نکند، ذره نسبت به چارچوب اختیارشده در سکون است. توجه به نسبیبودن حرکت به چارچوب مرجع اساسی است. ممکن است که ذرهای نسبت به یک چارچوب مرجع مشخص در سکون و نسبت به دیگری در حرکت باشد. پس سکون و حرکت واژگانی مطلق نیستند بلکه به چارچوب مرجع بستگی دارند. مثال بدیهی این بحث، سکون یک مسافر نسبت به وسیلهٔ متحرک و حرکت آن نسبت به جاده است.
مسیر
مسیر یک ذره، مکانهندسی نقاطی است میان نقاط آغاز و انتهای آن که به چارچوب مرجع بستگی دارد. ممکن است که مسیر یک ذره در یک چارچوب، خطی و در دیگری، منحنیالخط باشد.
جابهجایی
تغییر مکان، برداری است که تفاوت مکانی دو ذره را نشان میدهد. به عبارتی، بیانکنندهٔ تغییر موقعیت یک ذره است در طی یک بازهٔ زمانی. اگر ذرهٔ A دارای بردار مکان rA = (xA,yA,zA) و ذرهٔ B دارای بردار مکان rB = (xB,yB,zB) باشد، بردار جابهجایی rAB مربوط به B از A به صورت زیر بیان میشود:

بهطور هندسی، بردار جابهجایی، کوتاهترین مسیر میان دو ذزهٔ A و B است. جابهجایی متفاوت از بردار مکان است، به نحوی که مستقل از چارچوب مرجع است: موقعیت یک ذره بستگی به چارچوب مرجع دارد اما کوتاهترین مسیر میان یک جفت ذره، با درنظرگرفتن چارچوبهای متفاوت بدون تغییر میماند.
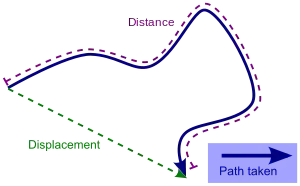
مسافت
مسافت را در فیزیک میتوان چنین بیان کرد: مسافت واقعی پیمودهشده توسط ذرهای که روی مسیری از A تا B در حرکت بوده، کمیت اسکالر Δs است که با در نظر گرفتن مسیر واقعی حساب میشود. این مفهوم در برابر تغییر مکان قرار میگیرد که صرفاً به نقاط شروع و پایان بستگی دارد و ماهیتی برداری دارد. برای مثال، یک ماشین مسابقه که حلقهٔ بستهٔ ۱۰ کیلومتری را طی میکند، گرچه مسافتی معادل ۱۰ کیلومتر را میپیماید اما چون نقاط شروع و پایان آن برهم منطبقاند، جابهجایی آن را صفر در نظر میگیریم.
اگر موقعیت یک ذره به صورت تابعی از زمان (r = r(t)) معلوم باشد، مسافت s که از زمان t1 تا t2 پیموده میشود عبارت است از:

این رابطه بر این حقیقت استوار است که در طی یک بازهٔ زمانی جزیی، اندازهٔ بردار جابهجایی با مسافت طیشده در آن بازهٔ زمانی برابر است. یک ایدهٔ مشابه هندسی این است که طول قوسهای جزیی بر رابط مستقیم ابتدا و انتهای طول قوس منطبق است.
سرعت و تندی
سرعت متوسط به صورت زیر تعریف میگردد:

که Δr تغییر در مکان و Δt بازهٔ زمانی است که تغییر مکان در آن رخ میدهد. جهت v مشابه جهت Δr است چرا که Δt>0.
سرعت، مقیاسی از آهنگ تغییر مکان نسبت به زمان است؛ به عبارتی، به چه میزان، مسافت یک ذره در هر لحظه از زمان تغییر میکند. سرعت یک بردار است. سرعت لحظهای (سرعت در یک لحظه از زمان)، حد سرعت متوسط است هنگامی که بازهٔ زمانی Δt محدودتر و محدودتر میشود. Δr و Δt هر دو به صفر میل میکنند اما v به مقدار غیرصفر v میل میکند. به بیان ریاضی:

که dr یک جابهجایی کوچک ناچیز و dt یک بازهٔ زمانی کوچک ناچیز است. همانطور که در تعریف دیفرانسیلی مشهود است، سرعت، آهنگ تغییر مکان است. ضمناً چون dr بر مسیر حرکت واقعی مماس است پس سرعت نیز چینن خاصیتی دارد و از آنجا که بردار مکان به چارچوب مرجع وابسته است، سرعت نیز به چارچوب مرجع بستگی دارد.
تندی یک جسم، اندازهٔ |v| سرعت آن است. در بیان اسکالر داریم:

مسافتی که توسط یک ذره پیموده میشود، هرگز نسبت به زمان کاهش نمییابد. پس ds/dt نامنفی است و بهطور ضمنی بهدست میآید که تندی نیز کمیتی نامنفی است. V=at+v0 X=1/2(v-v0)t∆ x2-x1=1/2at²+v0t x2-x1=-1/2at²+vt V²-v0²=2a∆x
شتاب
شتاب متوسط (شتاب در یک بازهٔ زمانی) به صورت زیر تعریف میگردد:


که Δv تغییر در سرعت و Δt بازهٔ زمانی است که تغییر سرعت در آن رخ میدهد.
شتاب، کمیتی برداری است که آهنگ تغییر سرعت را نسبت به زمان توصیف میکند. شتاب لحظهای (شتاب در یک لحظه از زمان) حد شتاب متوسط است هنگامی که Δt محدودتر و محدودتر میشود. در چنین حدگیری، a → a.

که dv یک تغییر کوچک ناچیز در سرعت و dt یک تغییر کوچک ناچیز در بازهٔ زمانی است.
انواع حرکت بر اساس سرعت و شتاب
اگر شتاب یک ذره صفر باشد، آنگاه سرعت در طی زمان ثابت است و حرکت یکنواخت نامیده میشود. در غیر این صورت حرکت غیریکنواخت است.
اگر شتاب، مخالف صفر اما ثابت باشد، حرکت را حرکت با شتاب ثابت گویند. در آن سو، اگر شتاب متغیر باشد، حرکت را حرکت با شتاب متغیر گوییم. در حرکت با شتاب متغیر، آهنگ تغییر شتاب را «jerk» گویند.
روابط انتگرالی
روابط بالا به کمک انتگرالهای ریاضی زیر نیز بیان میشوند:


سینماتیک حرکت شتابثابت
بسیاری از حالتهای فیزیکی را میتوانیم به کمک فرایندهای با شتاب ثابت بیان کنیم مانند حرکت پرتابی.
با انتگرالگیری از شتاب a نسبت به t، تغییرات در سرعت به دست میآید. اگر شتاب هم از لحاظ اندازه و هم جهت ثابت باشد، ذره در حرکت شتابدار یکنواخت است. در این صورت، روابط انتگرالی به فرم زیر ساده میشوند:


روابط دیگری نیز میان جابهجایی، سرعت و شتاب و زمان حاصل میشوند. چون a = (v − v0)/t، پس

با درنظرگرفتن مفهوم میانگین، این رابطه بیان میکند اگر شتاب ثابت باشد آنگاه سرعت متوسط ضربدر زمان، جابهجایی را نشان میدهد.
میتوان رابطهای مستقل از زمان را برای حرکت یکبعدی به دست آورد. چون at = v − v0، پس:

که. نشاندهندهٔ ضرب داخلی است. با تقسیم هردو طرف بر t و انجام ضرب داخلی داریم:

اگر حرکت، راستخط باشد، آنگاه (r - r0) با a موازی است و خواهیم داشت:

این رابطه را هنگامی به کار میبریم که زمان بهطور صریح معلوم نباشد.
سرعت نسبی
برای توصیف حرکت جسم A نسبت به جسم B، هنگامی که میدانیم هر دو جسم چگونه نسبت به یک ذرهٰ O در حرکتاند، قادریم که از جبر برداری استفاده کنیم. مبدأیی را برای این مرجع برمیگزینیم و مکان اجسام A وB و O را با rAو rB، و rO نشان میدهیم. مکان A نسبت به جسم مبدأ O عبارت است از:

در نتیجه، موقعیت A نسبت به B از این قرار است:

رابطهٔ بالا بیان میکند که حرکت A نسبت به B برابر حرکت A نسبت به O منهای حرکت B نسبت به O است که با جابهجایی جملات، به راحتی درک میگردد:

یا بهطور توصیفی: حرکت A نسبت به مرجع برابر حرکت B نسبت به مرجع بهعلاوهٔ حرکت A نسبت به B است. این مفاهیم با یک مرتبه مشتقگیری زمانی این مفاهیم به سرعت و با دو مرتبه مشتقگیری زمانی به شتاب گستره داده میشوند.
برای مثال فرض کنید شخصی با سرعت نسبت به مرجعی ثابت حرکت کند (از زیرنویس O صرفنظر میشود) و فرد دوم با سرعت نسبت به همان چارچوب مرجع حرکت کند، برای اینکه بفهمیم که نفر اول به چه میزان سریعتر از دومی است (که با سرعت نسبی نشان داده میشود) رابطهٔ بالا به عبارت زیر تبدیل میشود:




برای بهدستآوردن کافی است که یک جابهجایی انجام دهیم:

در سرعتهایی نزدیک به سرعت نور، این روابط برقرار نیسنتد و به جای آنها از روابط نظریه نسبیت خاص انیشتین استفاده میکنیم.
سینماتیک مطالعهٔ هندسهٔ حرکت است. در این بحث به دنبال حرکت اجسام عادی در دنیای خود هستیم. یک جسم عادی، مرئی و دارای مرز و مکانی است که با مختصههای (x, y, z) معلوم میگردد. در این بحث به دنبال نحوهٔ حرکت ذرات اتمی و سیاهچالهها یا نور نیستیم.
یک واژهنامه و گروهی از روشهای ریاضی را که حرکت معمولی را توصیف کنند توسعه میدهیم. متوجه باشید که تنها به دنبال ایجاد یک زبان برای معرفی حرکتیم و کاری به عامل حرکت یا تغییردهندهٔ حرکت یا بهطور دقیقتر، تکانههای جسم نداریم؛ یعنی به دنبال اثر نیروها در این مبحث نیستیم.
حرکت دورانی
سینماتیک دورانی یا زاویهای، توصیف دوران یک جسم است.[9] بدین منظور نیازمند روشهایی برای توصیف جهتگیری مانند زوایای اویلر هستیم. در مبحث زیر، توجه ما معطوف به حرکت دورانی ساده حول محوری با جهتگیری ثابت است (در اینجا محور z)
توصیف حرکت در چنین حالتی شامل سه کمیت زیر است:
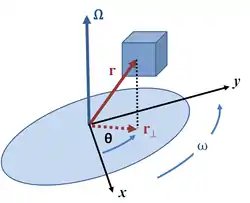
- موقعیت زاویهای: فاصلهٰ دارای جهت از یک مبدأ روی محور دوران به مکانی از جسم، بردار r (t) است که مکان جسم را معلوم میکند. این بردار شامل یک تصویر (یا بهطور معادل یک مؤلفهٰ) r⊥(t) روی یک صفحه عمود بر محور دوران است. موقعیت زاویهای این نقطه، زاویهٔ θ از یک محور مرجع (معمولاً محور مثبت xها) به بردار r⊥(t) در یک جهت گردش معلوم است (که معمولاً با قانون دست راست بیان میشود).
- سرعت زاویهای: سرعت زاویهای ω آهنگ تغییر موقعیت زاویهای θ نسبت به زمان است:

سرعت زاویهای در تصویر ۱ با بردار Ω نشان داده شده که در راستای محور دوران جهتگیری کرده و اندازهٔ آن ω است و جهت آن به کمک قانون دست راست معلوم میشود.
- شتاب زاویهای: اندازهٔ شتاب زاویهای α برابر آهنگ تغییرات سرعت زاویهای، ω، نسبت به زمان است:

معادلات حاکم بر جنبششناسی حرکت انتقالی به سادگی قابل تعمیم به سینماتیک دورانی صفحهای است:




در اینجا، θi و θf به ترتیب موقعیتهای زاویهای ابتدایی و انتهایی، ωi و ωf به ترتیب، سرعتهای زاویهای ابتدایی و انتهایی و α شتاب دورانی ثابتی است. گرچه مکان و سرعت در فضا هر دو بردارهای حقیقیاند (بر پایهٔ خواص آنها تحت دوران) (همچنین سرعت زاویهای) اما مفهوم زاویه به تنهایی یک بردار حقیقی نیست.
جسم نقطهای در حرکت دایرهای
این مثال مربوط به یک جسم «نقطهای» است؛ بدین ترتیب پیچیدگیهای ناشی از دوران خود جسم حول مرکز جرم آن نادیده گرفته میشوند.
جابهجایی. جسمی در یک حرکت دایرهای در موقعیتی قرار دارد که با بردار مکان r(t) معلوم میشود:

که uR بردار یکهای است که از محور دوران به محیط دایرهٔ دوران، به خارج جهتگیری کرده و فاصلهٔ آن با محور، برابر R است.
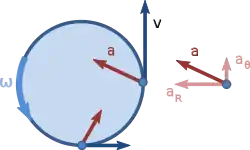
سرعت خطی. بر اساس رابطهٔ قبل، سرعت جسم از این قرار است:

با توجه به اینکه اندازهٔ بردار یکهٔ uR (بر اساس تعریف) ثابت است پس مشتق زمانی آن تنها به دوران آن با شعاع معلوم جسم بستگی دارد:

که uθ بردار یکهٔ عمود بر uR است و در جهت دوران است، ω(t) سرعت زاویهای دوران است که میتواند متغیر باشد و نماد × بیانگر ضرب خارجی است. پس سرعت خطی را میتوان به فرم زیر نوشت:

بنابر این رابطه، سرعت خطی مماس بر دایزهٔ دوران جسم است که در جهت دوران سمتگیری کرده و با افزایش ω، اندازهٔ آن زیاد میشود.
شتاب خطی. بهطور مشابه، شتاب جسم به صورت زیر تعریف میشود:

که یک عبارت aθ را که نشاندهندهٔ شتاب مماسی ناشی از شتاب زاویهای جسم (با فرض ω متغیر با زمان) و یک عبارت aR را که بیانگر شتاب مرکزگرا (یعنی به مرکز دوران جهتگیری کرده) است نشان میدهد.
دستگاههای مختصات
در هر وضعیت مفروض، بهترین دستگاههای مختصات بر اساس قیدهای حرکت یا ماهیت هندسی نیروی عامل حرکت یا اثرگذار بر آن معلوم میگردد. از اینرو برای توصیف حرکت یک مهرهٔ مقید به حرکت در یک حلقهٔ دایرهای، کاربردیترین مختصه، احتمالاً زاویهٰ آن روی حلقه است. بهطور مشابه، برای توصیف حرکت ذرهای که تحت نیروی مرکزگرا است، بهترین دستگاه مختصات، مختصات قطبی است. مختصات قطبی در سه بعد به دستگاههای متخصات استوانهای یا کروی تعمیم داده میشود. این دستگاهها برای سامانههاییاند که تقارن استوانهای یا کروی را نشان میدهند.
دستگاه مختصات دکارتی دوبعدی ثابت
در این دستگاه، بردارها به کمک جمع بردارهایی در راستاهای y,x و z از یک مبدأ غیردوار بیان میگردند. معمولاً j,i و k بردارهای یکه در راستاهای x-و y-و z- هستند.
بردار مکان، r، بردار سرعت، v و بردار شتاب، a، در این دستگاه چنین نمایش داده میشوند:



توجه کنید: ,


چارچوب مرجع دوبعدی دوار
این دستگاه مختصات تنها برای توصیف حرکت صفحهای به کار میرود و بر اساس سه بردار یکهٔ عمود برهم است؛ بردارهای یکهٔ i و j که پایهای برای توصیف صفحهایاند که جسم مورد نظر در آن قرار میگیرد و بردار یکهٔ k که دوران حول آن صورت میگیرد. بر خلاف متخصات دکارتی، که نسبت به یک مبدأ ثابت و غیردوار است، مبدأ این دستگاه میتواند دوران یا انتقال پیدا کند که معمولاً در پی حرکت یک ذرهٔ خاص روی جسم مورد مطالعه است.
مشتقهای بردارهای یکه
بردارهای مکان، سرعت و شتاب یک نقطهٔ مفروض را میتوانیم به کمک چنین دستگاههایی بیان کنیم اما نیاز به توجه بیشتری نسبت به دستگاههای با چارچوبهای مرجع ثابت داریم. از آنجا که چارجوب مرجع در حال دوران است، بردارهای یکه نیز دستخوش دوران میگردند و این دوران در هنگام مشتقگیری این بردارها میبایست لحاظ گردد. اگر چارچوب مرجع با سرعت زاویهای ω در جهت پادساعتگرد دوران کند (به عبارتی Ω = ω k با استفاده از قانون دست راست) آنگاه مشتقهای بردارهای یکه به صورت زیر است:


مکان، سرعت و شتاب
به کمک روابط گفتهشده قادریم تا مکان، سرعت، و بردارهای شتاب یک ذره را در چنین چارچوبهای مرجعی بیان کنیم.
مکان
به سادگی داریم:

که تنها فاصله از مبدأ در جهت هرکدام از بردارهای یکه است.
سرعت
سرعت، مشتق زمانی بردار مکان است:

و بر اساس قاعدهٔ ضرب به این صورت است:

که بر اساس روابط قبلی داریم:

یا بهطور معادل:

که در آن vrel سرعت ذره نسبت به دستگاه مختصات دوار است.
شتاب
شتاب، مشتق زمانی بردار سرعت است.
میدانیم که:

جز را در نظر بگیرید. دو بخش دارد و ما علاقهمندیم که مشتق: تغییر نسبی سرعت ()، و تغییر در دستگاه مختصات را بیابیم.



().


سپس، را در نظر بگیرید. با استفاده از قاعدهٰ زنجیرهای:


- از بالا:


با در نظرگرفتن مجموعهٰ بالا داریم:

با جمعکردن عبارات به رابطهٔ اساسی زیر میرسیم:[10]

جستارهای وابسته
معادله مستقل از زمان
در این معادله به زمان نیاز نداریم

منابع
- Moon، Francis C. (۲۰۰۷)، The Machines of Leonardo Da Vinci and Franz Reuleaux, Kinematics of Machines from the Renaissance to the 20th Century، Springer، شابک ۹۷۸۱۴۰۲۰۵۵۹۸۰
- Edmund Taylor Whittaker & William McCrea (۱۹۸۸)، "E+T+Whittaker"&lr=&as_brr=0&sig=SN7_oYmNYM4QRSgjULXBU5jeQrA&source=gbs_book_other_versions_r&cad=0_2#PPA1,M1 A Treatise on the Analytical Dynamics of Particles and Rigid Bodies، Cambridge University Press، Chapter ۱، شابک ۰۵۲۱۳۵۸۸۳۳
- Joseph Stiles Beggs (۱۹۸۳)، Kinematics، Taylor & Francis، ص. ۱، شابک ۰۸۹۱۱۶۳۵۵۷
- O. Bottema & B. Roth (۱۹۹۰)، Theoretical Kinematics، Dover Publications، reface، شابک ۰۴۸۶۶۶۳۴۶۹
- Thomas Wallace Wright (۱۸۹۶)، Elements of Mechanics Including Kinematics, Kinetics and Statics، E and FN Spon، Chapter ۱
- برای مثال ببینید: Russell C. Hibbeler (۲۰۰۹)، «Kinematics and kinetics of a particle»، Engineering Mechanics: Dynamics (ویراست ۱۲th)، Prentice Hall، ص. ۲۹۸، شابک ۰۱۳۶۰۷۷۹۱۹, Ahmed A. Shabana (۲۰۰۳)، «Reference kinematics»، Dynamics of Multibody Systems (ویراست ۲nd)، Cambridge University Press، شابک ۰۵۲۱۵۴۴۱۱۴ از پارامتر ناشناخته
|ISBN status=صرفنظر شد (کمک), P. P. Teodorescu (۲۰۰۷)، «Kinematics»، Mechanical Systems, Classical Models: Particle Mechanics، Springer، ص. ۲۸۷، شابک ۱۴۰۲۰۵۴۴۱۶ - A. Biewener (۲۰۰۳)، Animal Locomotion، Oxford University Press، شابک ۱۹۸۵۰۰۲۲X مقدار
|شابک=را بررسی کنید: length (کمک) - James R. Ogden & Max Fogiel (۱۹۸۰)، "curvilinear+kinematics"&lr=&as_brr=0&sig=WW7us4UJzSWOA19pfdAbwTJvPR4 The Mechanics Problem Solver، Research and Education Association، ص. ۱۸۴ از پارامتر ناشناخته
|شالک=صرفنظر شد (کمک) - R. Douglas Gregory (۲۰۰۶)، "rigid+body+kinematics"&lr=&as_brr=0#PRA1-PA25,M1 Classical Mechanics: An Undergraduate Text، Cambridge UK: Cambridge University Press، Chapter ۲، شابک ۰۵۲۱۸۲۶۷۸۰
- R. Douglas Gregory (۲۰۰۶)، "rigid+body+kinematics"&lr=&as_brr=0#PRA1-PA457,M1 Chapter 16، Cambridge: Cambridge University، شابک ۰۵۲۱۸۲۶۷۸۰
- "rigid+body+kinematics"&lr=&as_brr=0#PRA1-PA475,M1 «pp. 475-476»، R. Douglas Gregory، Cambridge: Cambridge University، ۲۰۰۶، شابک ۰۵۲۱۸۲۶۷۸۰
| نسبیت خاص |
|  | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| نسبیت عام |
| ||||||||||||
| دانشمندان |
| ||||||||||||
