تغذیه رو به جلو (کنترل)
تغذیه رو به جلو (انگلیسی: Feed-forward) عبارت است از توصیف یک عنصر یا مسیر در یک سیستم کنترل که سیگنال کنترلی را از یک منبع در محیط خارجی خود به یک بار دیگر در محیط خارجی خود منتقل میکند که اغلب یک سیگنال فرمان از اپراتور خارجی است. سیستم کنترلی که تغذیه رو به جلو دارد، به سیگنال کنترل خود در روش پیش از تعریف بدون پاسخ، به چگونگی واکنش بار جواب میدهد و در مقایسه با سیستمی عمل میکند که بازخورد دارد، خروجی را برای چگونگی تأثیر بار تنظیم میکند و چگونگی تغییر بار به صورت پیشبینیشده را در نظر میگیرد؛ این بار به محیط خارجی سیستم تعلق دارد. در تغذیه رو به کنترل، تنظیم متغیر کنترلی مبتنی بر خطا نیست در عوض، علم مبتنی بر دانش در مورد فرایند به شکل یک مدل ریاضی و دانش اندازهگیری اختلالات فرایند است.
بعضی از پیش نیازها برای کنترل طرح قابل اعتماد هستند:فرمان خارجی یا سیگنال کنترلی باید در دسترس باشد، و اثر خروجی سیستم بر روی بار باید شناخته شود. گاهی اوقات تغذیه رو به جلو بدون بازخورد «بالستیک» خوانده میشود، زیرا زمانی که سیگنال کنترل ارسال شدهاست، نمیتوان آن را تنظیم کرد؛ هر تنظیم اصلاحی باید به روش یک سیگنال کنترل جدید باشد. در مقابل، «کنترل پرواز» خروجی را در پاسخ به بار تنظیم میکند که با مکانیزم بازخورد مواجه میشود.
این سیستمها میتوانند به نظریه کنترل، فیزیولوژی، یا محاسبات مربوط باشند.
بررسی اجمالی
با استفاده از تغذیه رو به جلو، اختلالات سنجیده شده و قبل از اینکه زمان داشته باشند تا بر سیستم تأثیر گذارند مورد بررسی قرار میگیرند. در مثال خانه، یک سیستم تغذیه میتواند بازبودن در را اندازهگیری کند و قبل از آن که خانه خیلی سرد شود، گرمکن به طور خودکار روی بخاری روشن میشود. مشکل تغذیه رو به جلو این است که اثرات آشفتگی بر روی سیستم باید به دقت پیشبینی شود و نباید هیچیک از اختلالات اندازهگیری شده در این سیستم وجود داشته باشد. به عنوان مثال، اگر یک پنجره باز باشد، اندازهگیری نمیشود و ترموستات کنترل به جلو ممکن است اجازه خنک شدن خانه را بدهد. این عبارت معنای خاصی در زمینه کنترل خودکار مبتنی بر CPU دارد. نظم و انضباط «کنترل تغذیه رو به جلو» به طور گستردهای مورد بحث قرار میگیرد، اما به ندرت به دلیل دشواری و هزینه توسعه یا ارائه مدل ریاضی مورد نیاز برای تسهیل این نوع کنترل انجام میشود. سامانه کنترل حلقه باز و کنترل بازخورد، که اغلب بر پایه الگوریتمهای کنترل PID هستند، به طور گستردهای مورد استفاده قرار میگیرند.
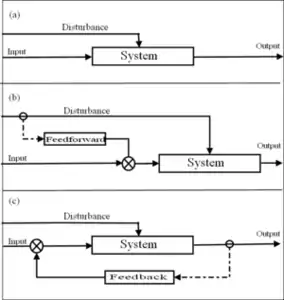
سه نوع سیستم کنترل وجود دارد: حلقه باز، تغذیه رو به جلو، و بازخورد. یک نمونه از یک سیستم کنترل حلقه باز به صورت دستی تحت فرمان ماشین موتور است. سیستم فرمان به یک منبع برق کمکی دسترسی ندارد و به مقاومت در برابر تغییر چرخها پاسخ نمیدهد. راننده باید واکنش را بدون کمک سیستم هدایت کند. در مقایسه، فرمان خودکار به یک منبع قدرت کمکی تحت کنترل دسترسی دارد که به سرعت موتور بستگی دارد. زمانی که فرمان هدایت میشود، یک دریچه باز میشود که به مایع اجازه میدهد تا چرخهای رانندگی را بچرخاند. یک سنسور بر این فشار نظارت دارد به طوری که دریچه تنها به اندازه کافی باز میشود تا فشار مناسب برای رسیدن به مکانیزم برگشت چرخ وجود داشته باشد. در خروجی سیستم تغذیه رو به جلو، تغییر جهت حرکت وسیله نقلیه، هیچ نقشی در سیستم ایفا نمیکند. کنترل پیشبینانه مدل را ببینید. اگر راننده را در سیستم ذکر کنید، او مسیر بازخورد را با مشاهده جهت سفر و جبران اشتباهات با چرخاندن فرمان انجام میدهد. در این حالت، یک سیستم بازخورد دارید و بلوک برچسب «سیستم» در شکل (c)یک سیستم رو به جلو است. به عبارت دیگر، سیستمهای مختلفی را میتوان در آن قرار داد و سیستم کلی به عنوان جعبه سیاه شناخته میشود.کنترل تغذیه رو به جلو کاملاً متفاوت از کنترل حلقه باز و سیستمهای تله رباتیک است. کنترل تغذیه رو به جلو به یک مدل ریاضی از کارخانه نیاز دارد (فرایند و / یا ماشین کنترلشده) و رابطه ماشین با هر ورودی یا بازخورد سیستم ممکن است دریافت شود. کنترل حلقه باز و سیستمهای تله رباتیک نیاز به پیچیدگی یک مدل ریاضی از سیستم فیزیکی یا کارخانه ندارند.کنترل مبتنی بر ورودی اپراتور بدون پردازش و تفسیر کامل از طریق یک مدل ریاضی سیستمیک سیستم تله رباتیک است و کنترل تغذیه رو به جلو در نظر گرفته نمیشود.
تاریخچه
از نظر تاریخی استفاده از واژه تغذیه رو به جلو در کارها و نوشتههای مک کی در سال ۱۹۵۶ دیده شد. در حالی که کار مک کی در زمینه نظریه کنترل بیولوژیکی است، او فقط از سیستمهای تغذیه رو به جلو سخن میگوید. مک کی به "کنترل تغذیه رو به جلو" اشاره نمیکند یا به رشته "کنترلهای محدود" اشاره میکند. مک کی و دیگر نویسندگان اولیه که از اصطلاح "feedforward" استفاده میکنند، معمولاً دربارهٔ نظریههایی دربارهٔ کارکرد مغز انسان یا حیوانات مینویسند. نظم "کنترل تغذیه رو به جلو" عمدتاً توسط استادان و دانشجویان کارشناسیارشد در جورجیا تک، MIT، استنفورد و کارنگی ملون توسعهیافتهاست. تغذیه رو به جلو معمولاً در انتشارات علمی مورد استفاده قرار نمیگیرد. در اواخر ۱۹۷۰ مک ال و سیرینگ در دانشگاه ام آی تی و بوک و دیکرسون از دانشگاه جورجیا شروع به توسعه این مفهوم کردند. تغذیه رو به جلو در بسیاری از مقالات علمی، مقالات و کتابها در اواخر دهه ۱۹۸۰به خوبی تعریف شد.
فواید
مزایای کنترل تغذیه رو به جلو به اندازه ای قابلتوجه هستند که میتوانند هزینه اضافی، زمان و تلاش مورد نیاز برای اجرای این تکنولوژی را توجیه کنند. اگر مدل ریاضی کیفیت کافی داشته باشد، دقت کنترل میتواند به اندازه یک درجه اندازه بهبود یابد و اجرای قانون کنترل تغذیه رو به جلو خوب انجام شود. مصرف انرژی توسط سیستم کنترل تغذیه رو به جلو و رانندهاش به طور معمول بسیار کمتر از سایر کنترلها است. مزایای دیگر این کنترل عبارتند از کاهش فرسایش و پارگی تجهیزات، هزینههای نگهداری کمتر، قابلیت اطمینان بالاتر و کاهش قابلتوجه در پسماند.
مدل
مدل ریاضی دستگاه (ماشین، فرایند یا ارگانیسم) استفادهشده توسط یک مهندس کنترل ممکن است توسط یک مهندس کنترل ایجاد شده یا توسط سیستم کنترل از آن یادگرفته شود. سیستمهای کنترل که قادر به یادگیری و / یا تطبیق مدل ریاضی آنها هستند، با افزایش سرعت ریزپردازنده عملیتر شدهاند. کنترل تغذیه رو به جلوی مدرن به خودی خود با اختراع ریزپردازنده امکانپذیر شد.کنترل تغذیه رو به جلو نیاز به یکپارچهسازی مدل ریاضی در الگوریتم کنترلی دارد به طوری که برای تعیین اقدامات کنترلی براساس آنچه در مورد وضعیت سیستم کنترل میشود، استفاده میشود. در مورد کنترل یک بازوی مصنوعی انعطافپذیر و سبکوزن، این مسئله میتواند به سادگی جبران کردن بین زمانی باشد که بازوی ربات یک بار مفید و مؤثر را حمل میکند. سیستمهایی که کنشها را برنامهریزی میکنند و سپس برنامه را به سیستم متفاوتی برای اجرا منتقل میکنند، تعریف بالا از کنترل تغذیه رو به جلو را ارضا نمیکنند. مگر اینکه این سیستم شامل وسیلهای برای تشخیص اختلال یا دریافت ورودی و پردازش باشد که ورودی از طریق مدل ریاضی برای تعیین تغییر مورد نیاز برای اقدام کنترلی وارد عمل شود، که این کنترل واقعی نیست.
سیستم باز
در نظریه سیستمها، یک سیستم باز یک سیستم رو به جلو است که هیچ حلقه بازخوردی برای کنترل خروجی آن ندارد. در مقابل، یک سیستم بسته از یک حلقه بازخورد برای کنترل عملیات سیستم استفاده میکند. در یک سیستم باز، خروجی سیستم به ورودی سیستم برای کنترل یا بهرهبرداری داده نمیشود.
برنامههای کاربردی
سیستم رو به جلو فیزیولوژیکی
در فیزیولوژی، کنترل تغذیه رو به جلو، با توجه به تنظیم نرمال پیشبینی ضربان قلب به پیشروی فیزیکی واقعی، نشان داده میشود.کنترل تغذیه رو به جلو را میتوان به واکنشهای پیشبینی برای نشانههای شناختهشده تشبیه کرد. سیستمهای رو به جلو در کنترل بیولوژیکی توسط مغز انسان و حیوانات هم یافت میشوند. حتی در مورد سیستمهای زیستی زیستی، مانند مغز انسان، دانش یا مدل ذهنی گیاه (بدن) رامی توان به علم ریاضی خواند زیرا این مدل با محدودیت، ریتم، مکانیک و الگو مشخص میشود. یک سیستم تغذیه رو به جلو، متفاوت از یک سیستم کنترل هم ایستایی است، که وظیفه حفظ تعادل پایدار محیط داخلی یا در حالت پایدار ثابت را دارد.
مقررات ژنی و تغذیه رو به جلو
تنظیم متقاطع ژنها را میتوان توسط یک گراف نشان داد، که در آن ژنها گرههای هستند ویک نود به دیگری پیوند دارد اگر اولین فاکتور رونویسی برای دومین فاکتور باشد. موتیف عمدتاً در همه شبکههای شناختهشده ظاهر میشود. این موتیف، به صورت یک سیستم به جلو تغذیه، تشخیص تغییر موقت محیط نشانداده شدهاست. موضوع کنترل رو به جلو، عموماً در فرایند تولید سلولهای خون ساز، که در آن تعهدات برگشتناپذیر ساخته شدهاند، مشاهده شدهاست.
سیستمهای رو به جلو در محاسبه
در محاسبات، تغذیه رو به جلو معمولاً به یک شبکه پرسپترون اشاره دارد که در آن خروجیهای همه نورونهابه دنبال دنبال کردن نیستند، اما هیچ حلقههای بازخوردی وجود ندارد. ارتباطات در طول یک مرحله آموزش تنظیم میشوند، که در واقع زمانی است که سیستم یک سیستم بازخورد است.
تلفن فاصله طولانی
در اوایل دهه ۱۹۷۰، سیستمهای انتقال کواکسیال دو طرفه، از جمله L-carrier، از تقویت کنندههای جریان تغذیه برای کاهش اعوجاج خطی استفاده میکردند. این روش پیچیدهتر، پهنای باند بیشتری نسبت به سیستمهای بازخورد قبلی میدهد. فیبر نوری، با این حال، چنین سیستمهایی را قبل از اینکه بسیاری ساخته شوند، منسوخ ساخته بودند.
اتوماسیون و کنترل ماشین
کنترل تغذیه رو به جلو رشتهای است که در زمینه کنترلهای خودکار مورد استفاده در اتوماسیون به کار میرود.
جستارهای وابسته
- جعبه سیاه (سامانه)
- سامانه کنترل حلقهباز
- پیشگویی اسمیت
