بازوی رباتیک
بازوی روباتیک نوعی بازوی مکانیکی، عموماً قابل برنامهریزی، است که کاربردهایی مشابه بازوی انسان دارد. بازوی رباتیک ممکن است خود یک ربات باشد یا بخشی از یک ربات پیچیدهتر باشد. اتصالات چنین بازویی آن چنانند که امکان جابجایی چرخشی (شبیه رباتهای بندی) یا انتقالی (خطی) را فراهم میکنند.[1][2] اتصالات بازو میتوانند یک زنجیره حرکتی (به انگلیسی kinematic chain) را ایجاد کنند. قسمت انتهایی زنجیره حرکتی بازوی مکانیکی، تأثیرگذار نهایی (به انگلیسی end effector) نامیده میشود.
دست رباتیک

تأثیرگذار نهایی، یا دست روباتیک، میتواند برای انجام هر وظیفه ای مثل جوشکاری، بستن، یا چرخاندن طراحی شود. برای مثال بازوی روبات در خط مونتاژ اتومبیل اعمالی مثل جوشکاری، چرخاندن و قرار دادن قطعات انجام میدهند.[5]
انواع

- ربات مختصات دکارتی/ ربات گانتری: برای اعمال برداشتن و قرار دادن اجسام استفاده میشود.
- ربات استوانه ای: برای اعمال مونتاژ استفاده میشود دامنه حرکتی آن به شکل یک سیلندر است.
- ربات کروی / ربات قطبی:دامنهٔ حرکتی آن یک کره را تشکیل میدهد.
- ربات اسکارا: برای برداشتن و قرار دادن اجسام استفاده میشود.
- ربات بندبند: حداقل سه مفصل چرخشی دارد.
- ربات موازی
- ربات انسان نما: شبیه دست انسان است.
بازوهای رباتیک مشهور
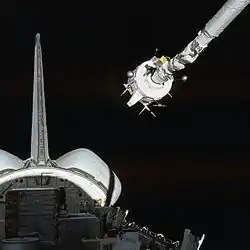
.jpg.webp)
در فضا، سامانه Manipulator از راه دور شاتل فضایی، که کانادارم خوانده میشود، مثالی از یک بازوی رباتیک است.[6] مریخ نورد کنجکاوی هم از یک بازوی رباتیک استفاده میکند.[7][8][9][10]
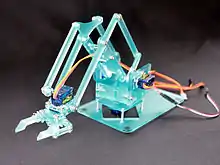
بازوهای رباتیک کم هزینه
در دهه ۲۰۱۰ بازوهای روباتیک کم هزینه رایج تر شدند و بیشتر در دسترس قرار گرفتند. گرچه چنین بازوهای رباتیکی بیشتر برای اهداف سرگرمی و آموزشی استفاده میشوند، کاربردهایی در خودکارسازی آزمایشگاهی و اوتوسمپلرها دارند.[11][12]
کنترل بازوهای روباتیک
امروزه راهکارهای کاربردی مختلفی جهت کنترل بازوهای رباتیکی وجود دارد. یکی از بهترین و در عین حال سادهترین روشها استفاده از نرم افزار Moveit است. این نرم افزار با کمک سیستم عامل روبات بسیاری از چالشها کنترل بازوهای روباتیک را حل کرده است. moveIt در واقع راهی برای کنترل بازوهای روباتیک (بازوهای صنعتی یا ربات انساننما ) است. Moveit یکی از اولین برنامه های کاربردی در سیستم عامل روبات برای کاربردهای رباتهای صنعتی است![13]
جستارهای وابسته
- چاپگر سهبعدی
- اندام ساختگی
- سوییت رباتیک
- برنامه نویسی آفلاین
منابع
- OSHA Technical Manual
- «Paper on Space Robotics, pg 9» (PDF). بایگانیشده از اصلی (PDF) در ۱۶ نوامبر ۲۰۱۷. دریافتشده در ۴ مارس ۲۰۱۸.
- "Robot Arm and Computer Vision". Retrieved 29 July 2016.
- "MeArm Open Source Robot Arm (source files)". Retrieved 21 June 2016.
- Staff (Sandia National Labs) (August 16, 2012), "Life-like, cost-effective robotic hand can disable IEDs", R&D Magazine, rdmag.com, retrieved September 13, 2012 More than one of
|accessdate=and|access-date=specified (help)More than one of|accessdate=and|access-date=specified (help) - IEEE Xplore:The Canadarm grasps this boom and can position it in the necessary positions to permit a complete inspection
- "Curiosity Rover - Arm and Hand". JPL. NASA. Retrieved 2012-08-21.
- Jandura, Louise. "Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges" (PDF). JPL. NASA. Retrieved 2012-08-21.
- "Curiosity Stretches its Arm". JPL. NASA. 21 August 2012. Archived from the original on 22 August 2012. Retrieved 2012-08-21.
- Billing, Rius; Fleischner, Richard (2011). "Mars Science Laboratory Robotic Arm" (PDF). 15th European Space Mechanisms and Tribology Symposium 2011. Retrieved 2012-08-21.
- Carvalho, Matheus C.; Eyre, Bradley D. (2013-12-01). "A low cost, easy to build, portable, and universal autosampler for liquids". Methods in Oceanography. 8: 23–32. doi:10.1016/j.mio.2014.06.001.
- McMorran, Darren; Chung, Dwayne Chung Kim; Li, Jonathan; Muradoglu, Murat; Liew, Oi Wah; Ng, Tuck Wah (2016-02-16). "Adapting a Low-Cost Selective Compliant Articulated Robotic Arm for Spillage Avoidance". Journal of Laboratory Automation: 2211068216630742. doi:10.1177/2211068216630742. ISSN 2211-0682. PMID 26882923.
- MoveIt کنترل بازوهای روباتیک
پیوند به بیرون
| مقالات اصلی |
|  |
|---|---|---|
| انواع |
| |
| طبقهبندیها | ||
| نقل و انتقال | ||
| پژوهش |
| |
| ||
