سامانه کنترل آتش
سامانه کنترل شلیک یا سامانه کنترل آتش دارای بخشهای مختلفی از جمله توپ یا اسلحه (gun)، رایانه دادهها و جهتیاب (director) است که با هم کار میکنند تا به سامانه تسلیحاتی در زدن هدف مورد نظر کمک کنند. نحوهٔ کارکرد سامانه کنترل شلیک همانند شخص تیرانداز است که تیراندازی میکند با این تفاوت که این کار توسط سامانه کنترل شلیک سریعتر و دقیقتر انجام میشود.
کنترل شلیک از روی کشتی
سامانههای کنترل شلیک نخست برای کشتیها ایجاد شدند.
تاریخچهٔ اولیهٔ کنترل شلیک دریایی بیشتر در ارتباط با درگیری با اهداف در محدوده یا فاصلهٔ دید (قابل رویت) بود (که تحت عنوان شلیک مستقیم نیز شناخته میشود). در حقیقت، اکثر درگیریهای دریایی پیش از سال ۱۸۰۰ در فاصلهٔ ۲۰ تا ۵۰ یارد (۲۰ تا ۵۰ متر) بود [۱]. حتی در طول جنگ داخلی آمریکا، درگیری مشهور بین USS Monitor و CS Virginia اغلب در فاصلهٔ کمتر از ۱۰۰ یارد (۹۰ متر) بود.[1]
پیشرفتهای فنی سریع در اواخر قرن ۱۹ باعث شد تا این محدوده [درگیری] تا حدی افزایش یابد که شلیک توپخانه امکانپذیر باشد. تسلیحات با گلولهٔ توپ انفجاری بسیار بزرگ با وزن نسبتاً کم (در مقایسه با توپهای تمام فلزی) به قدری محدودهٔ درگیری را افزایش دادند که مشکل اساسی هدفگیری آنها در حین حرکت کشتی روی موجهای متحرک بود. این مشکل با معرفی ژیروسکوپ (gyroscope) حل شد که حرکتها را تصحیح کرد و دقتهایی کمتر از درجه را فراهم آورد. هماکنون میتوان توپها را با هر اندازهای ساخت که بسرعت اندازهٔ ۱۰ اینچ کالیبر با ورود به قرن ۲۰ میسر شد. این تسلیحات دارای چنان محدودهٔ درگیری زیادی بودند که تنها مشکل آنها دیدن هدف بود که منجر به استفاده از دکلها (masts) در داخل کشتیها شد.
پیشرفت فنی دیگر پیدایش توربین بخار بود که بازده کشتیها را بشدت افزایش داد. کشتیهای پروانهای ابتدایی شاید قابلیت ۱۶ گره (knot) را داشتند، اما نخستین کشتیهای توربینی بزرگ قابلیتی بیش از ۲۰ گره را داشتند. وجود این کشتیها همراه با محدودهٔ زیاد شلیک تسلیحات باعث شد تا کشتیها مسافت خیلی زیادی (طول چند کشتی) را از زمان شلیک گلوله توپ تا فرود آمدن آن بپیمایند. دیگر نیازی به سنجش هدف [با چشم] با هر دقت احتمالی نبود. همچنین، در درگیریهای دریایی، لازم است تا شلیک چند توپ همزمان کنترل شود.
کنترل شلیک تسلیحات دریایی معمولاً شامل سه مرحله پیچیدگی است. کنترل محلی ناشی از قرارگیری تسلیحات اصلی که هدف گروههای تسلیحاتی جدا است. هدفِ مورد نظر کنترل جهتیاب همگی توپها روی کشتی در یک هدف منفرد است. شلیک هماهنگ توپخانه از گروهی از کشتیها روی یک هدف نقطه مشترک عملیات گروهی کشتیهای جنگی بودند. اصلاح سرعت سطحی باد، حرکت و زاویه کشتی شلیککننده، دمای انبار مهمات و باروت، رانش پرتابه-ها، قطر خود توپ که برای افزایش فاصله تیراندازیها تنظیم شدهاست، و نرخ تغییر محدوده یا فاصله با اصلاح بیشتر روی روش شلیک بر مبنای مشاهدهٔ شلیکهای قبلی انجام شد.
جهتهای بدست آمده که تحت عنوان روش شلیک شناخته میشوند ممکن است برای هدفگیری در اختیار برجکها قرار گیرند. اگر شلیکها به هدف برخورد نکنند مشاهدهگر باید روی فاصله و جهت شلیکهای از دست رفته کار کند و میتوان این اطلاعات را همراه با هر تغییر دیگری روی اطلاعات در اختیار رایانه قرار داد تا شلیک دیگری انجام شود.
نخست، هدف این بود که توپخانهها از روش شلیک نقطهزنی استفاده کنند. این کار شامل شلیک تسلیحات به هدف، مشاهدهٔ نقطهٔ اثر (محل فرود)، و اصلاح هدف بر مبنای محل مشاهده شدهٔ فرود گلوله توپ بود که این کار با بزرگتر شدن محدودهٔ شلیک بسیار دشوارتر شد.[2]
بین جنگ داخلی آمریکا و ۱۹۰۵، چند پیشرفت کوچک همانند دستگاههای نشانهروی تلسکوپی و فاصلهیابهای نوری در کنترل شلیک ایجاد شدند. همچنین، پیشرفتهای رویهای همانند استفاده از بوردهای نقشهبرداری برای پیشبینی دستی محل کشتی در حین درگیری وجود داشت[3]
سپس، از محاسبهگرهای مکانیکی بسیار پیچیده برای هدفگیری مناسب پرتابه استفاده شد که این کار معمولاً با نقطهیابهای مختلف و اندازهگیری فاصلههای ارسالی به ایستگاه نقطهیاب مرکزی در داخل کشتی انجام شد. تیمهای جهتیابِ شلیک مواردی همانند مکان، سرعت، جهت کشتی و هدف آن، همچنین تنظیمات متعددی برای اثر کوریولس (Coriolis)، اثرات آب و هوایی روی هوا و سایر تنظیمات را در نظر گرفتند. تقریباً در سال ۱۹۰۵، دستگاه کمکی کنترل شلیک مکانیکی همانند میز درییر (Dreyer Table), Dumaresq (که بخشی از میز درییر هم بود) و ساعت آرگو (Argo Clock) مطرح شدند. اما این دستگاهها سالها زمان برد تا کاربرد گستردهای بیابند.[4][5]]. این دستگاهها اشکال ابتدایی فاصلهنگهدارها (rangekeeper) بودند.
آرتور پولن و فردریک چارلز درییر به صورت جداگانه نخستین سامانههایی از این نوع را ایجاد کردند. پولن پس از مشاهدهٔ دقت پایین توپخانهٔ دریایی در آموزش نظامی نزدیک مالت در سال ۱۹۰۰ شروع به کار بر روی این موضوع کرد[6]لورد کلوین که به عنوان دانشمند برجستهٔ بریتانیایی شناخته میشد نخستین بار استفاده از رایانه آنالوگ را برای حل معادلاتی پیشنهاد داد که از حرکت نسبی کشتیهای درگیر در نبرد و تأخیر زمانی در حرکت گلولهٔ توپخانه استفاده میکرد تا منحنی مسیر لازم و بدین ترتیب جهت و ارتفاع توپها را محاسبه کند.
هدف پولن ایجاد رایانه مکانیکی مرکب و طرح خودکار محدودهها و سرعتها برای استفاده در کنترل مرکزی شلیک بود. برای دسترسی به داده-های دقیق موقعیت و حرکت نسبی هدف، پولن واحد نقشهکشی (یا پلاتری) را برای اکتساب این دادهها ایجاد کرد. برای این کار او ژیروسکوپی را برای انحراف کشتی جنگی اضافه کرد. همانند پلاتر، ژیروسکوپ اولیه به توسعهٔ اساسی برای فراهم کردن دستورالعمل پیوسته و قابل اعتماد نیاز داشت.[7]]. هرچند نمونههای آزمایشی در سال ۱۹۰۵ و ۱۹۰۶ غیرموفق بودند، اما امیدبخش به نظر میرسیدند. پولن در این کار توسط دریاسالار چکیی فیشر، دریاسالار آرتور نیوت ویلسون و مدیر مهمات و اژدر دریایی (DNO) جان جلیکو ترغیب شد. پولن کار خود را با چند تست انجام شده روی کشتی جنگی متعلق به نیروی دریایی سلطنتی ادامه داد.
در عین حال، گروهی به رهبری درییر سامانه مشابهی را طراحی کردند. هر چند هر دو سامانه برای کشتیهای جدید و موجود نیروی دریایی سلطنتی سفارش داده شدند، نهایتاً سامانه درییر در شکل نهایی Mark IV* خود مقبولیت بیشتری پیدا کرد. اضافه شدن کنترل جهتیاب باعث شد تا سامانه کنترل شلیک کامل و واقعی برای کشتیهای جنگ جهانی اول میسر شود و اکثر کشتیهای نیروی دریایی سلطنتی تا اواسط ۱۹۱۶ به آنها مجهز شدند. جهتیاب در بالای کشتی قرار گرفت جاییکه اپراتورها دید وسیعی نسبت به هر شخص نشانهگیر در برجکها داشتند. این دستگاه همچنین قادر بود شلیک از برجکها را طوری هماهنگ کند که شلیک مرکب آنها به صورت هماهنگ انجام شود. این کار هدفگیری را بهتر کرد. فاصلهیابهای نوری بزرگتر تخمین محل دشمن را در زمان شلیک بهبود دادند. نهایتاً، بجای این سامانه از میز کنترل آتش ادمایرالتی (Admiralty Fire Control Table) برای کشتیهای ساخته شده پس از ۱۹۲۷ استفاده شد.[8]
فاصلهنگهدارها در خدمات بلند مدت خود اغلب به صورت فناوری پیشرفته به-روزرسانی شدند و در جنگ جهانی دوم آنها بخش بسیار مهم سامانه کنترل شلیک یکپارچه شدند. یکپارچهسازی رادار در سامانه کنترل شلیک نخستی جنگ جهانی دوم این امکان را برای کشتیها فراهم کرد تا عملیات مؤثر شلیک در فاصلهٔ زیاد و در آب و هوای بد در شب میسر شود[9] برای سامانههای کنترل شلیک در نیروی دریایی ایالات متحده، به لینک سامانههای کنترل شلیک توپ کشتی (ship gun fire-control systems.) مراجعه کنید.
استفاده از شلیک کنترل شده با جهتیاب همراه با رایانه کنترل شلیک باعث شد تا کنترل نشانهگیر از روی برجکهای مجزا به محل مرکزی جابجا شود؛ هرچند که پایههای مجزای اسلحهها و برجکهای چند توپخانهای می-تواند استفاده از گزینهٔ کنترل محلی را درحین آسیب ناشی از نبرد روی انتقال اطلاعات جهتیاب حفظ کند (اینها ممکن است نسخههای سادهتر تحت عنوان میزهای برجک (turret tables) در نیروی دریایی سلطنتی باشد). در نتیجه تسلیحات قابلیت شلیک در رگبارهای برنامهریزی شده را داشتند که هر توپ مسیر کمی متفاوت داشت. پراکندگی شلیک ناشی از اختلاف در هر یک از تسلیحات مجزا، گلولههای مجزا، دنبالهٔ آتش باروت، و اعوجاج گذرای ساختار کشتی بدون تردید در محدوده درگیریهای دریایی معمول بزرگ بود. جهتیابها در بالای سازههای بلند دید بهتری از موقعیت دشمن در مقایسه با دید جهتیابهای قرار گرفته روی برجک داشتند و خدمهای که روی آنها کار میکردند از صدا و موج انفجار تسلیحات دور بودند. جهتیابهای تسلیحات در بالاترین نقطه بودند و سرهای فاصلهیابهای نوری آنها از طرفین آنها به جلو آمده بودند که ظاهر متفاوتی به آنها داده بود.
فاکتورهای بالیستیک اندازهگیری نشده و غیرقابل کنترل همانند دما، رطوبت، فشار بارومتری، جهت و سرعت باد در ارتفاع بالا به تنظیم نهایی از طریق مشاهدهٔ فرود گلوله نیاز داشت. اندازهگیری محدودهٔ دید (هم هدف و هم پاشندگی توپ گلوله) پیش از مطرح شدن رادار دشوار بود. بریتانیاییها فاصله-یابهای همزمان را ترجیح دادند در حالیکه آلمانیها به نوع استروسکوپی علاقه داشتند. اولی قدرت کمی در یافتن فاصله از هدف نامشخص داشت اما برای اپراتور در مدت زمان طولانی استفاده از آن راحتتر بود، دومی برعکس مورد اول بود.

زیردریاییها نیز به دلایل مشابه به رایانههای کنترل شلیک مجهز شدند، اما مشکل آنها برجستهتر بود؛ در «شلیک» معمولی، یک تا دو دقیقه زمان لازم است تا اژدر به هدف خود برسد. محاسبهٔ «هدایت» دقیق با توجه به حرکت نسبی دو کشتی بسیار دشوار بود و رایانههای دادههای اژدر برای بهبود زیاد در سرعت این محاسبات افزوده شدند.
در کشتی نوعی بریتانیایی در جنگ جهانی دوم، سامانه کنترل شلیک برجکهای جداگانهٔ تسلیحات را به برج هدایتکننده متصل میکرد (جائیکه تجهیزات دیدهبانی قرار داشتند) و رایانه آنالوگ در قلب کشتی قرار داشت. در برج هدایتکننده، اپراتورها تلسکوپهای خود را روی هدف تنظیم می-کردند؛ یکی از تلسکوپها ارتفاع و دیگری سمت یا جهت را میسنجید. اندازهگیریها توسط میز کنترل شلیک به جهات و ارتفاعهایی برای شلیک تسلیحات تبدیل میشدند. در برجکها، شخص نشانهگیر ارتفاع تسلیحات را برای تطبیق با شاخص ارتفاع انتقالی از میز کنترل شلیک تنظیم میکرد –نشانهگیر برجک همین کار را برای جهت انجام میداد. هرگاه تسلیحات روی هدف قرار میگرفت، شلیک آنها به صورت مرکزی انجام میشد.[10]
حتی با مکانیزاسیون زیاد روی این فرایند، هنوز به کار زیاد انسانی نیاز بود؛ ایستگاه انتقال (اتاقکی که میز درییر داخل آن قرار داشت) برای تسلیحات اصلی هوود ۲۷ خدمه را دربرداشت.
جهتیابها تا حد زیادی در معرض شلیک دشمن قرار داشتند. قرار دادن زره بسیار سنگین در ارتفاع بالای کشتی دشوار بود و حتی اگر مانع از شلیک میشد، خود اثر به تنهایی ممکن بود جهتیابی تجهیزات را تغییر دهد. زره بیشتر برای حفاظت در برابر توپهای کوچکتر و برخورد اجزا به سایر بخشهای کشتی یک محدودیت محسوب میشد.
کارکرد رایانه آنالوگ شگفتانگیز بود. کشتی جنگی USS North Carolina در طول رزمایش ۱۹۴۵ میتوانست راهکار شلیک دقیقی را [۱۲] روی هدف در طول یک سری از شلیکهای بسیار سریع داشته باشد [۱۳]. این مزیت اساسی برای جنگ محسوب میشد تا در حین درگیری با دشمن قدرت مانور داشت.
درگیریهای دریایی شبانه از فاصلهٔ دور زمانی امکانپذیر شد که دادههای رادار به صورت ورودی در اختیار فاصلهنگهدار قرار داده شدند. کارایی این ترکیب در نوامبر سال ۱۹۴۲ در جنگ سوم جزیرهٔ ساوو نشان داده شد که در آن کشتی USS Washington با کشتی جنگی ژاپنی کیریشیما در فاصله-ی ۸۴۰۰ یاردی (۷٫۷ کیلومتری) در شب درگیر شدند. کیریشما شعلهور شد و چند انفجار در آن رخ داد و با خدمهٔ خود غرق شد. حداقل ۹ گلولهٔ ۱۶-اینچی (۴۱۰ میلیمتر) از ۷۵ شلیک (نرخ برخورد ۱۲٪) به این کشتی برخورد کرد[11] بقایای کیریشما در سال ۱۹۹۲ کشف شد و مشاهده شد که کل بخش سینی کشتی وجود ندارد[12] ژاپنیها در طول جنگ جهانی دوم بخشهایی مانند رادار یا کنترل خودکار شلیک را در سطح نیروی دریایی آمریکا توسعه نداده و بسیار عقب بودند.[13]
در سالهای ۱۹۵۰، برجکهای تسلیحات تا حد زیادی بدون دخالت انسان و خودکار بودند بطوریکه نشانهگیر از راه دور و از مرکز کنترل کشتی با استفاده از ورودیهای رادار و سایر منابع کنترل میشدند.
آخرین نبرد برای فاصلهنگهدارهای آنالوگ حداقل برای نیروی دریایی ایالات متحده در جنگ خلیج فارس در سال ۱۹۹۱ بود [۱۶] در این جنگ فاصله نگهدارها روی کشتیهای جنگی کلاس آیوا جهتگیری گلولهها را در نبرد بر عهده داشتند.
کنترل شلیک از هوا
نشانه گیرهای بمب افکن در جنگ جهانی دوم
نخستین کاربرد سامانههای کنترل شلیک، در هواپیمای بمب افکن بود که از دستگاه نشانهگیری بمب برای پیشبینی و نمایش نقطهٔ اثر یا فرود بمب انداخته شده در آن لحظه از روی دادههای مربوط به ارتفاع و سرعت هواپیما استفاده میکرد. بهترین دستگاه در ایالات متحده دستگاه نشانهگیری بمب نوردن بود.
نشانه گیرهای بمب افکن هوایی در جنگ جهانی دوم
از سامانههای ساده که تحت عنوان نشانهگیرهای محاسباتی پیشرو نیز شناخته میشدند سپس در هواپیما و در جنگ به عنوان نشانه گیرهای تسلیحات ژیرو استفاده شد. این دستگاهها از ژیروسکوپ برای اندازهگیری سرعت شلیکها استفاده میکردند و نقطهٔ هدف نشانه گیر توپ را برای در نظر گرفتن این امر جابجا میکردند با این هدف که نقطهٔ هدف از طریق نشانه گیر رفلکتور وجود داشته باشد. تنها ورودی دستی برای این نشانه گیر فاصلهٔ هدف بود که معمولاً از طریق تنظیم اندازهٔ اسپن بالای هدف در برخی از فواصل شناخته شده انجام میشد. دستگاههای کوچک رادار در دوران پس از جنگ برای خودکار کردن این ورودی افزوده شدند اما این کار تقریباً پیش از زمانی افزوده شد که خلبان در مورد سرعت آن رضایت داشته باشد.
سامانههای پس از جنگ جهانی دوم
با شروع جنگ ویتنام، پیش بین گر بمب افکن رایانهای جدیدی تحت عنوان سامانه بمب افکن ارتفاع کم (LABS) روی سامانههای هواپیما افزوده شد تا تسلیحات هستهای را حمل کند. این بمب رایانهای جدید انقلابی محسوب میشد که در آن فرمان شلیک بمب توسط رایانه و نه خلبان ارسال میشد؛ خلبان با استفاده از رادار یا سایر سامانههای هدفگیری هدف را مشخص میکرد و سپس با انداختن بمب موافقت میکرد و سپس رایانه این کار را با «نقطهٔ فرود» محاسبه شده پس از چند ثانیه انجام میداد. این کار با سامانههای قبلی فرق داشت و هرچند سامانههای قبلی نیز رایانهای بودند اما هنوز «نقطهٔ فرود» را محاسبه میکردند تا مشخص شود که اگر بمب در آن لحظهای انداخته شود کجا فرود خواهد آمد. مزیت اساسی این روش در آن است که میتوان تسلیحات را حتی در حین مانور هواپیما با دقت پرتاب کرد. برای اکثر نشانه گرهای بمب تا این زمان لازم بود هواپیما ارتفاع (معمولاً سطح) ثابتی داشته باشد هرچند نشانه گیرهای شیرجه ای (dive) نیز چیز معمولی بودند.
سامانه LABS اساساً برای تسهیل تاکتیکی تحت عنوان بمباران در حین صعود هواپیما طراحی شد تا به هواپیما این اجازه را بدهد که خارج از شعاع موج انفجار تسلیحات قرار بگیرد. اصول محاسبهٔ نقطهٔ فرود در نهایت روی رایانههای کنترل شلیک در بمب افکنهای بعدی و هواپیمای جنگی افزوده شد که امکان شلیک بمب در سطح [ثابت]، شیرجه و صعود را میسر میکرد. همچنین، با افزوده شدن رایانه کنترل شلیک به سامانههای توپخانه، رایانه میتوانست مشخصات پرواز تسلیحات ارسالی را در نظر بگیرد.
کنترل شلیک زمینی
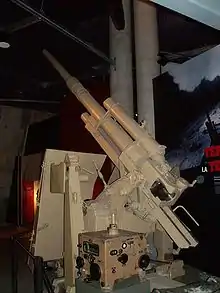
کنترل شلیک ضدهوایی
با شروع جنگ جهانی دوم، بازده ارتفاع هواپیما تا حد زیادی افزایش یافت بطوریکه تسلیحات ضدهوایی با مسائل پیشبینی کنندهٔ مشابهی مواجه بودند و تا حد زیادی به رایانههای کنترل شلیک مجهز بودند. اختلاف اساسی بین این سامانهها و سامانههای روی کشتی اندازه و سرعت بود. نخستین نمونههای سامانه کنترل با زاویهٔ بالا یا HACS در نیروی دریایی سلطنتی بریتانیا مثالی از سامانهی بودند که بر مبنای این فرض پیش بین کار میکرد که سرعت، جهت و ارتفاع هدف ممکن است در حین چرخهٔ پیشبینی ثابت بماند بطوریکه در فاصلهٔ زمانی بین چاشنی گذاری بمب و زمان حرکت بمب به سمت هدف قرار داشت. سامانه USN Mk 37 از فرضیات مشابهی استفاده میکرد بطوریکه میتوانست سرعت ثابت مربوط به تغییرات ارتفاع را پیشبینی کند. پیش بین گر کریسون نمونه ای از سامانهی است که برای حل مسألهٔ نشانهگیری در زمان-واقعی ساخته شد که این کار تنها با نشانهگیری جهتیاب روی هدف و سپس هدفگیری بمب روی پوینتری که روی آن نشانه رفتهاست انجام میشود. همچنین، این دستگاه عمداً سبک و کوچک ساخته شد تا جابجایی آن همراه تسلیحاتی که برای آنها بکار میرود آسان باشد.
از سامانه ضدهوایی M-9/SCR-584 مبتنی بر رادار برای هدایت تسلیحات دفاعی هوایی از سال ۱۹۴۳ استفاده میشود. SCR-584 مربوط به آزمایشگاه تابش MIT نخستین سامانه راداری با ردیابی خودکار بود، M-9 آزمایشگاه بل[14] رایانه کنترل شلیک آنالوگ الکترونیکی بود که جایگزین رایانههای مکانیکی پیچیده شد که ساخت آنها دشوار بود (همانند Sperry M-7 یا پیش بین گر کرسون بریتانیایی). همراه با ماسوره گذاری مجاور VT، این سامانه عمل فوق العادهٔ پرتاب تسلیحات کروز V-I را با کمتر از ۱۰۰ گلوله در هر هواپیما انجام داد (چند هزار گلوله در سامانههای ابتدایی AA معمول بود)[15][16] این سامانه در دفاع لندن و آنتورپ [بلژیک] در مقابل VI مفید بود.
هرچند سامانههای کنترل شلیک ضدهوایی جزو سامانههای کنترل شلیک زمینی محسوب میشوند میتوان از آنها در سامانههای دریایی و هوایی نیز بهره برد.
کنترل شلیک توپخانه ساحلی
در ایالات متحده، سامانههای کنترل شلیک توپخانهٔ ساحلی در پایان قرن ۱۹ ایجاد شد و تا جنگ جهانی دوم پیشرفت داشت.[17]
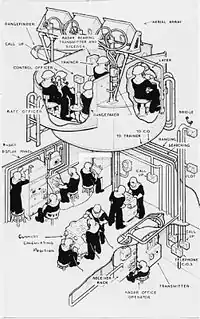
سامانههای ابتدایی از چند ایستگاه مشاهده یا ایستگاه عقب (شکل ۱) برای یافتن و ردیابی کردن اهدافی استفاده کردند که به اسکلههای آمریکایی حمله کردند. سپس دادههای گرفته شده از این ایستگاهها در اختیار اتاق نقشهکشی قرار داده میشد که در آنجا دستگاههای مکانیکی آنالوگ همانند بورد نقشهکشی برای تخمین مکان اهداف و استخراج دادههای شلیک برای توپهایی از تسلیحات ساحلی برای دفع آنها بکار برده میشد.
دژهای تسلیحات ساحلی ایالات متحده[18] همراه با انواع مهمات از خمپارههای دفاع ساحلی ۱۲ اینچی تا تسلیحات میانبرد ۳ و ۶ اینچی تا تسلیحات بزرگ شامل دیوارهٔ زرهی ۱۰ و ۱۲ اینچی و تسلیحات حامل ناپدیدشونده، تسلیحات مسلسل ۱۴ اینچی، و کانن ۱۶ اینچی پیش از جنگ جهانی دوم و تا آن وجود داشت.
کنترل شلیک در توپخانهٔ ساحلی از نظر اصلاح دادههای شلیک برای عواملی مانند شرایط آب و هوایی، شرایط باروت بکار رفته، یا چرخش زمین بسیار پیچیدهتر شد. تدارکاتی نیز برای تنظیم دادههای شلیک برای فرود مشاهده شدهٔ گلوله مهیا شد. همانطورکه در شکل ۲ نشان داده شدهاست، همهٔ این اطلاعات دوباره به اتاقهای نقشهکشی برگردانده شدند تا برنامهریزی زمانی بسیار دقیقی انجام شود که توسط سامانه زنگ فاصلهٔ زمانی کنترل میشد که در سرتاسر سامانه دفاع هر اسکله ای به صدا در میآید.[19]
درست پس از جنگ جهانی دوم، رایانههای دادههای تسلیحات الکترومکانیکی متصل به رادارهای دفاع ساحلی جای مشاهدهٔ نوری و روشهای نقشهکشی دستی را در کنترل توپخانهٔ ساحلی گرفتند. حتی پس از آن، روشهای دستی به عنوان پشتیبان در پایان جنگ استفاده شدند.
سامانههای کنترل مستقیم و غیرمستقیم شلیک
میتوان از سامانههای کنترل شلیک زمینی هم در شلیک مستقیم و هم شلیک غیرمستقیم در درگیری نظامی بهره برد. این سامانهها در تسلیحاتی وجود دارند که در محدودهٔ مهمات دستی کوچک تا تسلیحات توپخانه ای بزرگ قرار دارند.
سامانههای پیشرفتهٔ کنترل شلیک
رایانههای پیشرفتهٔ کنترل شلیک همانند رایانههای با بازده بالا به صورت دیجیتالی هستند. بازده افزوده شده اساساً این امکان را فراهم می-آورد تا بتوان هر نوع ورودی از چگالی هوا و باد، تا فرسودگی لولهٔ تسلیحات و اعوجاج ناشی از گرما را در نظر گرفت. این نوع اثرات برای هرگونه تسلیحاتی چشمگیر هستند و رایانههای کنترل شلیک روی پلتفرمهای بسیار کوچک هم وجود دارند. تانکها یکی از کاربردهای ابتدایی بودند که نشانهگیری خودکار هدف از فاصلهیاب لیزری و اندازهگیر اعوجاج لوله استفاده کردند. رایانههای کنترل شلیک نه تنها برای کاننهای بزرگ مفید هستند بلکه میتوان از آنها برای تسلیحات ماشینی، کاننهای کوچک، مهمات هدایت شده، گلولهها، نارنجکها، راکتها و هر نوع تسلیحاتی استفاده کرد که دارای پارامترهای شلیک یا شلیک متغیر هستند. آنها معمولاً روی کشتیها، زیردریاییها، هواپیماها، تانکها و حتی برخی تسلیحات کوچک نیز نصب میشوند برای نمونه پرتاب کنندههای نارنجک برای استفاده در گلولهٔ تهاجمی بول پاپ F2000 نشنال فابریک ایجاد شدند. رایانههای کنترل شلیک از همگی مراحل فناوری که رایانهها دارند عبور کردهاند برخی از طراحیها بر مبنای فناوری آنالوگ و سپس لولههای خلأ هستند که سپس جایگزین ترانزیستورها شدند.
سامانههای کنترل شلیک اغلب به حسگرها (همانند سونار، رادار، جستجو و ردیابی مادون قرمز، فاصلهیابهای لیزر، بادسنج، بادنما، ترمومتر، بارومتر و غیره) متصل هستند تا میزان اطلاعاتی را که باید به صورت دستی برای محاسبهٔ راهکار مناسب وارد کرد حذف یا کاهش داد. سونار، رادار، IRST و فاصلهیابها میتوانند جهت و فاصلهٔ هدف را ارائه دهند. بهطور جایگزین، میتوان از نشانه گیر نوری استفاده کرد بشرطی که اپراتور بتواند به سادگی محل هدف را نشانهگیری کند. این کار از وارد کردن فاصله توسط شخص با استفاده از روشهای دیگر و هشدار کم به هدف تحت تعقیب راحتتر است. معمولاً، تسلیحاتی که در فواصل بلند شلیک میشوند نیاز به اطلاعات محیط (فاصله ای که مهمات میتوانند طی کنند) میزان باد، دما، چگالی هوا و غیره دارند که بر مسیر آن تأثیر خواهد گذاشت بنابراین داشتن اطلاعات دقیق برای داشتن راهکاری خوب ضروری است. برخی مواقع، برای راکتهای دوربرد، دادههای محیطی باید در ارتفاعهای بلند یا بین نقطهٔ شلیک و هدف بدست بیاید. اغلب، از ماهوارهها یا بالونها برای گردآوری این اطلاعات استفاده میشود.
به محض محاسبهٔ روش شلیک، بسیاری از سامانههای کنترل شلیک نیز میتوانند هدفگیری کرده و مهمات را شلیک کنند. این امر با توجه به سرعت و دقت انجام میشود و در رابطه با هواپیما یا تانک، برای اینکه خلبان/شخص شلیک کننده/غیره بتواند همزمان کارهای دیگری مانند ردیابی هدف یا پرواز با هواپیما را انجام دهد. حتی اگر سامانه نتواند خود تسلیحات شلیک شده را جهتگیری کند، برای نمونه کانن ثابت روی هواپیما، میتواند کمکهایی در مورد هدفگیری را در اختیار اپراتور قرار دهد. معمولاً، نقاط کانن رو به جلو هستند و خلبان باید هواپیما را طوری کنترل کند که پیش از شلیک به درستی جهتیابی شود. در بیشتر هواپیماها نشانهگیری به شکل «پایپر» ظاهر میشود که روی صفحه نمایش روبروی خلبان (HUD) مشاهده میشود. پایپر به خلبان نشان میدهد که هدف باید در چه نسبتی از هواپیما قرار بگیرد تا اصابت به آن انجام شود. هرگاه خلبان مانور روی هواپیما را انجام دهد بطوریکه هدف و پایپر روی هم قرار گیرند، او شلیک را انجام میدهد یا در برخی از هواپیماها مهمات به صورت خودکار به این نقطه شلیک میشوند تا بر تأخیر خلبان فایق آمد. در حالت شلیک موشک، رایانه کنترل شلیک ممکن است فیدبکی در مورد اینکه هدف در محدوده موشک قرار دارد یا نه و اینکه اگر شلیک انجام شود به هدف برخورد میکند یا نه در اختیار خلبان قرار میدهد. سپس خلبان منتظر میماند تا قرائت احتمالات به صورت رضایت بخشی پیش از پرتاب مهمات امکانپذیر باشد.
جستارهای وابسته
منابع
- "Chronology of the USS Monitor: From Inception to Sinking". The Mariner's Museum. USS Monitor Center. Archived from the original on 2006-07-13. Retrieved 2006-08-26.
- The increasing range of the guns also forced ships to create very high observation points from which optical rangefinders and artillery spotters could see the battle. The need to spot artillery shells was one of the compelling reasons behind the development of naval aviation and early aircraft were used to spot the naval gunfire points of impact. In some cases, ships launched manned observation balloons as a way to artillery spot. Even today, artillery spotting is an important part of directing gunfire, though today the spotting is often done by unmanned aerial vehicles. For example, during Desert Storm, UAVs spotted fire for the Iowa-class battleships involved in shore bombardment.
- See, for example US Naval Fire Control, 1918.
- Mindell, David (2002). Between Human and Machine. Baltimore: Johns Hopkins. pp. 25–28. ISBN 0-8018-8057-2.
- The reasons were for this slow deployment are complex. As in most bureaucratic environments, institutional inertia and the revolutionary nature of the change required caused the major navies to move slow in adopting the technology.
- Pollen 'Gunnery' p. 23
- Pollen 'Gunnery' p. 36
- For a description of an Admiralty Fire Control Table in action: Cooper, Arthur. "A Glimpse at Naval Gunnery". Ahoy: Naval, Maritime, Australian History.
- The degree of updating varied by country. For example, the US Navy used servomechanisms to automatically steer their guns in both azimuth and elevation. The Germans used servomechanisms to steer their guns only in elevation, and the British began to introduce Remote Power Control in elevation and deflection of 4-inch, 4.5-inch and 5.25-inch guns in 1942, according to Naval Weapons of WW2, by Campbell. For example HMS Anson's 5.25-inch guns had been upgraded to full RPC in time for her Pacific deployment.
- B.R. 901/43, Handbook of The Admiralty Fire Control Clock Mark I and I*
- A. Ben Clymer (1993). "The Mechanical Analog Computers of Hannibal Ford and William Newell" (pdf). 15 (2). doi:10.1109/85.207741. Retrieved 2006-08-26.
- Anthony P. Tully (2003). "Located/Surveyed Shipwrecks of the Imperial Japanese Navy". Mysteries/Untold Sagas Of The Imperial Japanese Navy. CombinedFleet.com. Retrieved 2006-09-26.
- Mindell, David (2002). Between Human and Machine. Baltimore: Johns Hopkins. pp. 262–263. ISBN 0-8018-8057-2.
- "BLOW HOT-BLOW COLD - The M9 never failed". BELL LABORATORIES RECORD. XXIV (12): 454–456. Dec 1946.
- Baxter, "Scientists Against Time"
- Bennett, "A History of Control Engineering"
- For early background, see "Fire Control and Position Finding: Background" by Bolling W. Smith in Mark Berhow, Ed. , "American Seacoast Defenses: A Reference Guide," CDSG Press, McLean, VA, 2004, p. 257.
- See for example, the write-up on Fort Andrews in Boston Harbor for a summary of artillery assets and fire control systems typical of these defenses.
- For a complete description of fire control in the Coast Artillery, see "FM 4-15 Coast Artillery Field Manual-Seacoast Artillery Fire Control and Position Finding," U.S. War Department, Government Printing Office, Washington, 1940.
